
Abstract
Skilled forelimb behaviors are among the most important for studying motor learning in multiple species including humans. This protocol describes learned forelimb tasks for mice using a two-axis robotic manipulandum. Our device provides a highly compact adaptation of actuated planar two-axis arms that is simple and inexpensive to construct. This paradigm has been dominant for decades in primate motor neuroscience. Our device can generate arbitrary virtual movement tracks, arbitrary time-varying forces or arbitrary position- or velocity-dependent force patterns. We describe several example tasks permitted by our device, including linear movements, movement sequences and aiming movements. We provide the mechanical drawings and source code needed to assemble and control the device, and detail the procedure to train mice to use the device. Our software can be simply extended to allow users to program various customized movement assays. The device can be assembled in a few days, and the time to train mice on the tasks that we describe ranges from a few days to several weeks. Furthermore, the device is compatible with various neurophysiological techniques that require head fixation.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$29.99 / 30 days
cancel any time
Subscribe to this journal
Receive 12 print issues and online access
$259.00 per year
only $21.58 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout





Similar content being viewed by others


Data availability
An example raw data file is provided in Supplementary Data 1. Additional data are available upon reasonable request.
Code availability
LabVIEW code used for operating the robotic manipulandum is available from GitHub: https://GitHub.com/mjwagner/haptic-for-mice.
References
Shadmehr, R. & Mussa-Ivaldi, F. A. Adaptive representation of dynamics during learning of a motor task. J. Neurosci. 14, 3208–3224 (1994).
Shadmehr, R., Smith, M. A. & Krakauer, J. W. Error correction, sensory prediction, and adaptation in motor control. Annu. Rev. Neurosci. 33, 89–108 (2010).
Smith, M. A. & Shadmehr, R. Intact ability to learn internal models of arm dynamics in Huntington’s disease but not cerebellar degeneration. J. Neurophysiol. 93, 2809–2821 (2005).
Pasalar, S., Roitman, A. V., Durfee, W. K. & Ebner, T. J. Force field effects on cerebellar Purkinje cell discharge with implications for internal models. Nat. Neurosci. 9, 1404–1411 (2006).
Padoa-Schioppa, C. Neurobiology of economic choice: a good-based model. Annu. Rev. Neurosci. 34, 333–359 (2011).
Mathis, M. W., Mathis, A. & Uchida, N. Somatosensory cortex plays an essential role in forelimb motor adaptation in mice. Neuron 93, 1493–1503.e6 (2017).
Komiyama, T. et al. Learning-related fine-scale specificity imaged in motor cortex circuits of behaving mice. Nature 464, 1182–1186 (2010).
Tennant, K. A. et al. The organization of the forelimb representation of the C57BL/6 mouse motor cortex as defined by intracortical microstimulation and cytoarchitecture. Cereb. Cortex 21, 865–876 (2011).
Azim, E., Jiang, J., Alstermark, B. & Jessell, T. M. Skilled reaching relies on a V2a propriospinal internal copy circuit. Nature 508, 357–363 (2014).
Guo, J. Z. et al. Cortex commands the performance of skilled movement. Elife 4, e10774 (2015).
Chen, C. C., Gilmore, A. & Zuo, Y. Study motor skill learning by single-pellet reaching tasks in mice. J. Vis. Exp. 85, e51238 (2014).
Lambercy, O. et al. Sub-processes of motor learning revealed by a robotic manipulandum for rodents. Behav. Brain Res. 278, 569–576 (2015).
Vigaru, B. et al. A small-scale robotic manipulandum for motor training in stroke rats. in 2011 IEEE International Conference on Rehabilitation Robotics. 1–7 (IEEE, 2011). https://doi.org/10.1109/ICORR.2011.5975349
Vigaru, B. C. et al. A robotic platform to assess, guide and perturb rat forelimb movements. IEEE Trans. Neural Syst. Rehabil. Eng. 21, 796–805 (2013).
Wagner, M. J. et al. Shared cortex-cerebellum dynamics in the execution and learning of a motor task. Cell 177, 669–682 (2019).
Wagner, M. J., Kim, T. H., Savall, J., Schnitzer, M. J. & Luo, L. Cerebellar granule cells encode the expectation of reward. Nature 544, 96–100 (2017).
Campion, G. The pantograph MK-II: a haptic instrument. in The Synthesis of Three Dimensional Haptic Textures: Geometry, Control, and Psychophysics 45–58 (Springer, 2011).
Wagner, M. J. & Smith, M. A. Shared internal models for feedforward and feedback control. J. Neurosci. 28, 10663–10673 (2008).
Flash, T. & Hogan, N. The coordination of arm movements: an experimentally confirmed mathematical model. J. Neurosci. 5, 1688–1703 (1985).
Acknowledgements
M.J.W. is supported by a Career Award at the Scientific Interface from the Burroughs Wellcome Fund. M.J.S. and L.L. are HHMI investigators. This work was supported by NIH and NSF grants.
Author information
Authors and Affiliations
Contributions
M.J.W. and J.S. designed the manipulandum. M.J.W. designed and implemented the electronics and software code for robot control and designed and implemented behavioral tasks and training strategies. T.H.K. designed the mouse-restraining tube and contributed to robot assembly design. M.J.S. and L.L. supervised the project. All authors contributed to the manuscript writing.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Peer review information Nature Protocols thanks Silvestro Micera and the other anonymous reviewer(s) for their contribution to the peer review of this work.
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Related links
Key references using this protocol
Wagner, M. J. et al. Cell 177, 669–682 (2019): https://doi.org/10.1016/j.cell.2019.02.019
Wagner, M. J. et al. Nature 544, 96–100 (2017): https://doi.org/10.1038/nature21726.
Supplementary information
Supplementary Information
Supplementary Fig. 1.
Supplementary Video 1
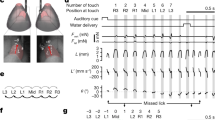
Mouse executing a task in which it is required to reach to one of three target regions (as in Fig. 4e).
Supplementary Data 1
Example raw data set from which Fig. 4f and the right-most panel of Fig. 4g are derived.
Supplementary Data 2
STL files that can be used directly to print the custom manipulandum parts, and the aluminum flange STP file for machining services.
Rights and permissions
About this article

Cite this article
Wagner, M.J., Savall, J., Kim, T.H. et al. Skilled reaching tasks for head-fixed mice using a robotic manipulandum. Nat Protoc 15, 1237–1254 (2020). https://doi.org/10.1038/s41596-019-0286-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/s41596-019-0286-8
This article is cited by
-
Peripersonal encoding of forelimb proprioception in the mouse somatosensory cortex
Nature Communications (2023)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
