
The octopus borrows a jointed-vertebrate strategy to transfer an item between points.
Abstract
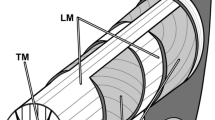
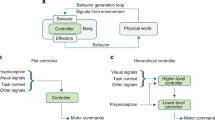
Animals with rigid skeletons can rely on several mechanisms to simplify motor control1,2,3,4,5,6,7,8,9 — for example, they have skeletal joints that reduce the number of variables and degrees of freedom that need to be controlled. Here we show that when the octopus uses one of its long and highly flexible arms to transfer an object from one place to another, it employs a vertebrate-like strategy, temporarily reconfiguring its arm into a stiffened, articulated, quasi-jointed structure. This indicates that an articulated limb may provide an optimal solution for achieving precise, point-to-point movements.
This is a preview of subscription content, access via your institution
Access options
Subscribe to this journal
Receive 51 print issues and online access
$199.00 per year
only $3.90 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout

Similar content being viewed by others

References
Flash, T. & Hogan, N. J. Neurosci. 5, 1688–1703 (1985).
Harris, C. M. & Wolpert, D. Nature 394, 780–784 (1998).
Feldman, G. Biophysics 11, 766–775 (1966).
Bizzi, E., Hogan, N., Mussa-Ivaldi, F. A. & Giszter, S. Behav. Brain. Sci. 15, 603–613 (1992).
Bizzi, E., Tresch, M. C., Saltiel, P. & d'Avella, P. Nature Rev. Neurosci. 1, 101–108 (2000).
Soechting, J. F., Buneo, C. A., Herrmann, U. & Flanders, M. J. Neurosci. 15, 6271–6280 (1995).
Flash, T. & Sejnowski, T. J. Curr. Opin. Neurobiol. 11, 655–662 (2001).
Sabes, P. N. Curr. Opin. Neurobiol. 10, 740–746 (2000).
Wolpert, D. M. & Ghahramani, Z. Nature Neurosci. suppl. 3, 1212–1217 (2000).
Gutfreund, Y. et al. J. Neurosci. 16, 7297–7307 (1996).
Gutfreund, Y., Flash, T., Fiorito, G. & Hochner, B. J. Neurosci. 18, 5976–5987 (1998).
Sumbre, G. et al. Science 293, 1845–1848 (2001).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Supplementary information
Supplementary Methods
Includes technical information on video and EMG recordings and kinematical analysis of the fetching movements. It also describes how the quasi-articulated structure is dynamically adjusted according to the position of the grasped food along the arm and demonstrates the positive correlation between the geometrical characteristics of the quasi-articulated structure and the recorded muscle activities. (DOC 35 kb)
Supplementary Figure
EMG recordings are positively correlated with the length of the quasi-articulated structure. (DOC 52 kb)
Movie
A movie showing an octopus in captivity fetching a living crayfish to its mouth. (QT 10356 kb)
Rights and permissions
About this article
Cite this article
Sumbre, G., Fiorito, G., Flash, T. et al. Motor control of flexible octopus arms. Nature 433, 595–596 (2005). https://doi.org/10.1038/433595a
Published:
Issue Date:
DOI: https://doi.org/10.1038/433595a
This article is cited by
-
High-stretch, tendon-driven, fiber-reinforced membrane soft actuators with multiple active degrees of freedom
Communications Engineering (2024)
-
A syntactic analysis of a complex motor action: the octopus arm ‘slap’
Marine Biology (2023)
-
Explanation Within Arm’s Reach: A Predictive Processing Framework for Single Arm Use in Octopuses
Erkenntnis (2023)
-
Triazophos-induced Respiratory and Behavioral Effects and Development of Adverse Outcome Pathway (AOP) for short-term Exposed Freshwater Snail, Bellamya Bengalensis
Bulletin of Environmental Contamination and Toxicology (2023)
-
Make up your mind: octopus cognition and hybrid explanations
Synthese (2021)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
